Welcome to AURlabCVsimulator
This repository is made for testing different computer vision methods by simulating a mission done in Trondheimsfjorden in April 2016
Libarys used
-
Python: 2.7.11 —Anaconda 2.5.0 (64-bit)
-
scipy: 0.17.0
-
numpy: 1.10.4
-
matplotlib: 1.5.1
-
pandas: 0.17.1
-
sklearn: 0.17
Folders of images to run simulations on
- images_L&R_avoided obstacle first try
- repeatExperiment
- images close to transponder
Mehtods in AURlabCVsimulator
Stereo camera method: - Dipsarity method
Mono camera methods also called the texture based methods:
- LBP ROI method
-
Haralick ROI method
-
SLIC Superpixel Locally Binary Pattern method
- SLIC Superpixel Harlick method
Bellow are some examples:
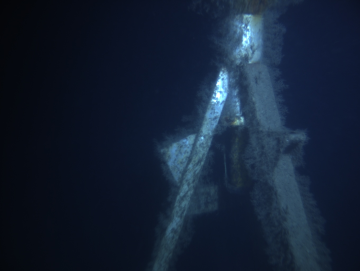
Typical underwater image with an obstacle
Image with an obstacle
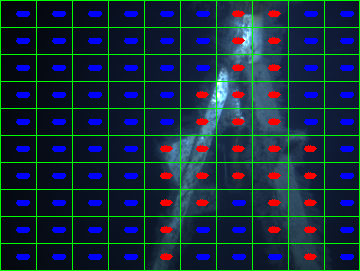
EXAMPLE OF THE LBP ROI method
Predicted image with lbp
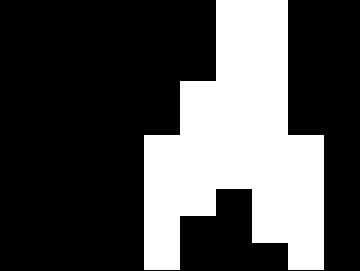
Display maskedImage image
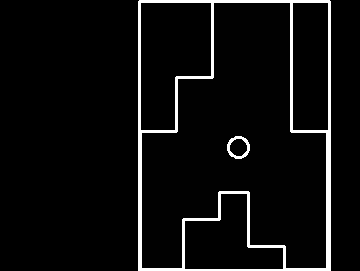
Display countour center and boundingbox of the predicted obstacle
EXAMPLE OF THE PREDICTION WITH Haralick ROI method
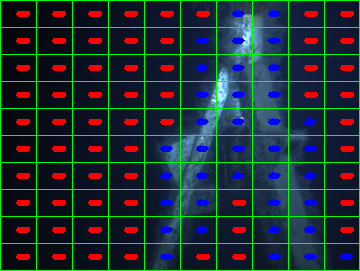
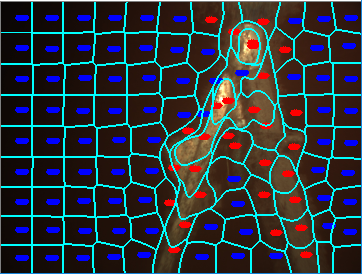
EXAMPLE OF THE PREDICTION WITH SLIC Superpixel Locally Binary Pattern method
Stereo camera methods
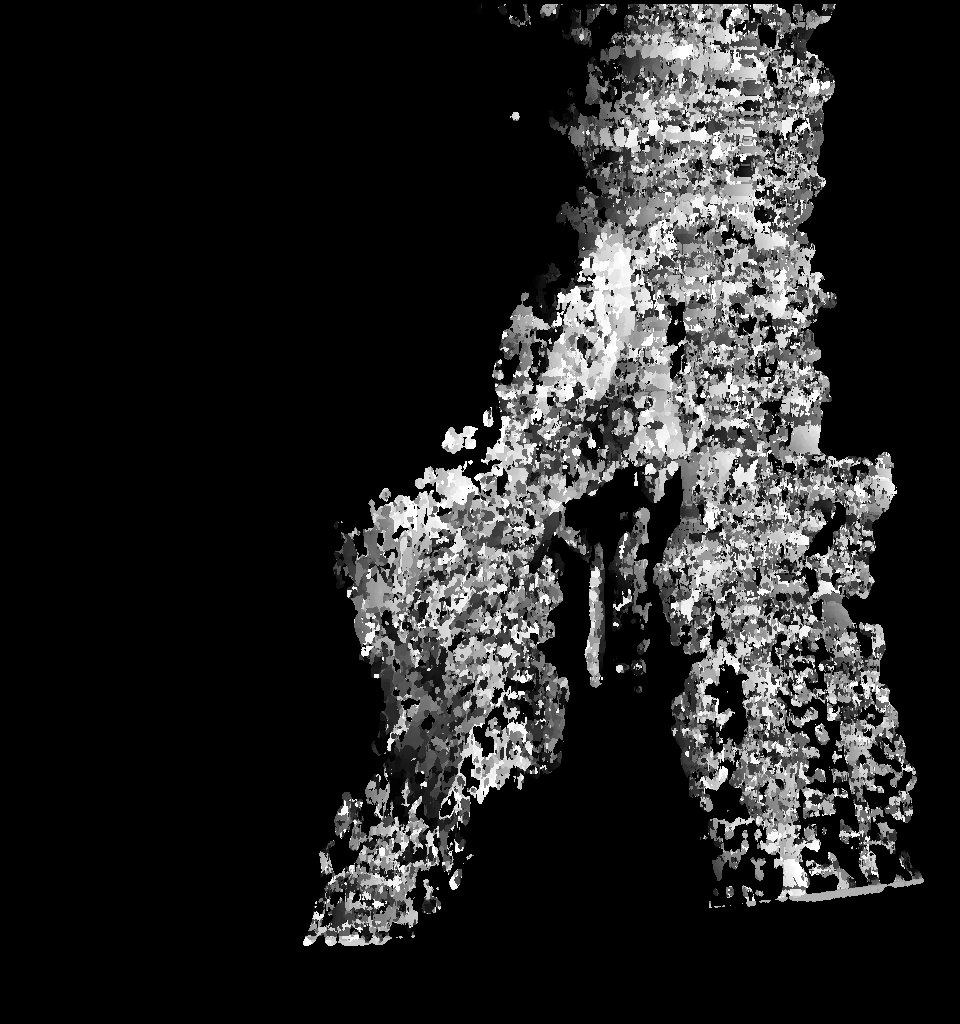
EXAMPLE OF THE Obstacle avoidance with Dipsarity method
Usefull links to understnad parts of the code faster
Unifrom Local Binary Pattern (watch this to understand better): - https://www.youtube.com/watch?annotation_id=annotation_98709127&feature=iv&src_vid=wpAwdsubl1w&v=v-gkPTvdgYo
- Lars Brusletto Master thesis