Finding the center of the disparity image
# import neccasary pacages
import numpy as np
import cv2
# load disparity image
image = cv2.imread("disparity_visualBW_23.jpg")
print str(image.dtype)
cv2.imshow("image", image)
cv2.waitKey(0)
# save the image
cv2.imwrite("docsIMG/disparity_image.png", image)
uint8
True
The image displayed

Extract the countour
--> draw the coutour for vizualization
# import neccasary pacages
import numpy as np
import cv2
# load disparity image
#image = cv2.imread("C:\CV_projects\AURlabCVsimulator\notebooks\countours\disparity_visualBW_23.jpg")
image = cv2.imread("disparity_visualBW_23.jpg")
# The image need to be monochrome i.e only one channel --> no (r,g,b)
# to be able to run findContours
imageMono= image
imageMono = cv2.cvtColor(image, cv2.cv.CV_BGR2GRAY)
#image = imageMono
# make image abs
#image = cv2.convertScaleAbs(image)
# prepare image for centroid calculations
# DILATE white points...
imageMono = cv2.dilate(imageMono, np.ones((5, 5)))
imageMono = cv2.dilate(imageMono, np.ones((5, 5)))
#image = image.astype(np.uint8)
# find all contours in the image and draw ALL contours on the image
#(cnts, _) = cv2.findContours(image.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
(contours0, _) = cv2.findContours(imageMono, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
clone = imageMono.copy()
cv2.drawContours(clone, contours0, -1, (255, 255, 255), 2)
print "Found {} contours".format(len(contours0))
# show the output image
cv2.imshow("All Contours", clone)
cv2.waitKey(0)
# save the image
cv2.imwrite("docsIMG/All_Contours_disparity.png", clone)
Found 9 contours
True
The image displayed
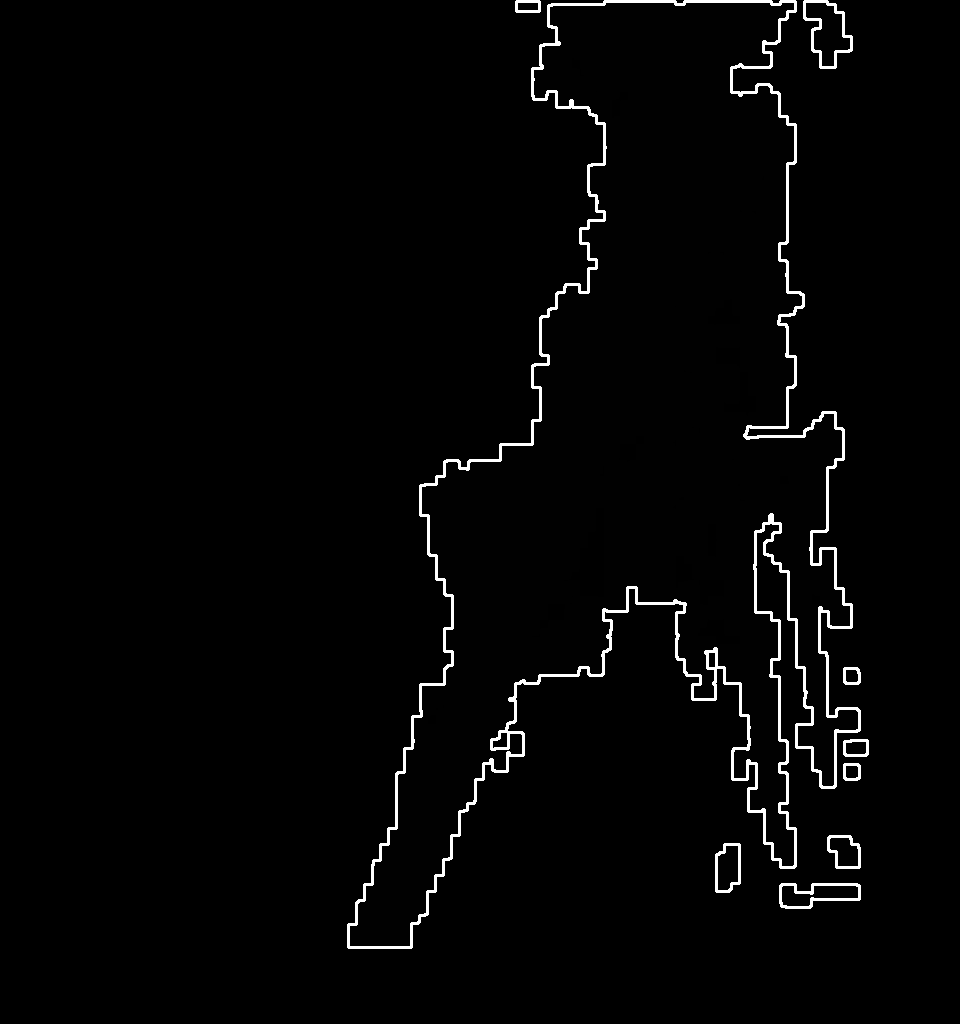
The image displayed
Finding the center of the object
Since there is different sizes of coutours, we need a way to weigh them so we get the average center of all the area seen.
The geometric center is given by summing up all then centroids respective x and y position and multiplying them with there respective "Area".
area = cv2.contourArea(cnt)
m = cv2.moments(cnt)
centroid_X = [area *int(round(m['m10']/m['m00']))]
centroid_y = [area *int(round(m['m01']/m['m00']))]
Then to Average all the centroids we divide by the totale Area given the folowing formula
centroid_XList/areaTot
centroid_YList/areaTot
Before we sum up alle the "scaled" x and y positions to tp give the real centers.
C_X = np.sum(centroid_XListCenters)
C_Y = np.sum(centroid_YListCenters)
centroid_XList = []
centroid_YList = []
areaTot = 0
for (i, cnt) in enumerate(contours0):
area = cv2.contourArea(cnt)
# compute the moments of the contour
# use the moments to compute the "center of mass" of each contour
m = cv2.moments(cnt)
centroid_X = [area *int(round(m['m10']/m['m00']))]
centroid_y = [area *int(round(m['m01']/m['m00']))]
centroid_XList.append(centroid_X)
centroid_YList.append(centroid_y)
areaTot = areaTot + area
centroid_XList = np.asarray(centroid_XList)
centroid_YList = np.asarray(centroid_YList)
# take the average
centroid_XListCenters = centroid_XList/areaTot
centroid_YListCenters = centroid_YList/areaTot
# sum the points and cast to int so cv2.draw works
objectCenterX = int(np.sum(centroid_XListCenters))
objectCenterY = int(np.sum(centroid_YListCenters))
print objectCenterX
print objectCenterY
642
441
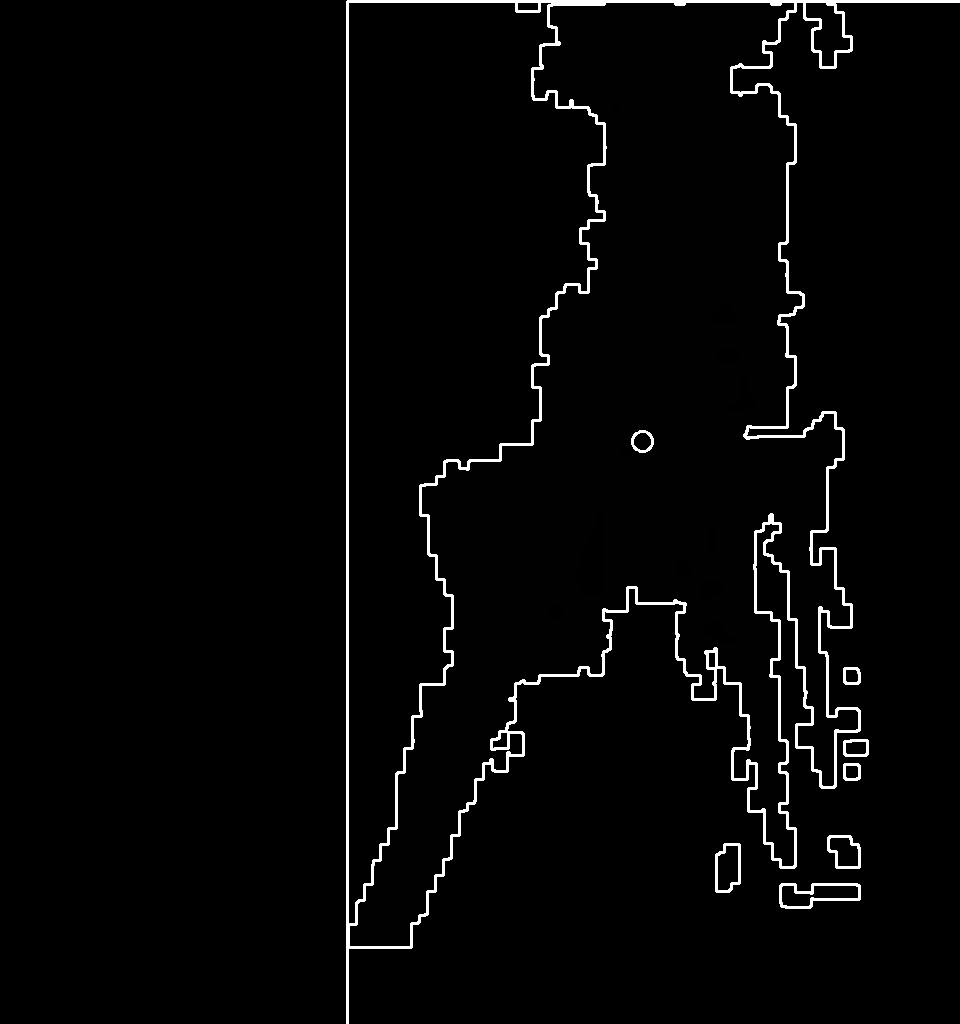
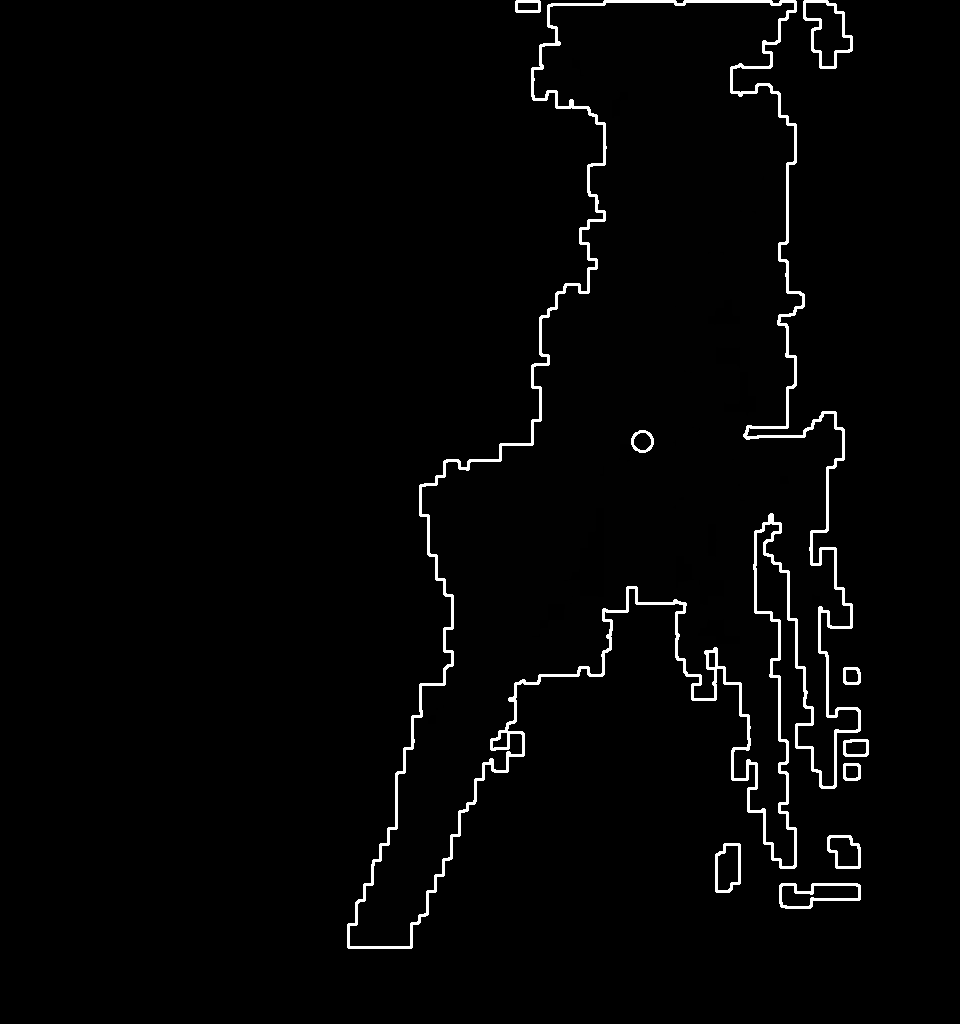
Draw the center on the image to check it is correct
# Unpack tuple.
#objectCenterX = int(objectCenterX)
#objectCenterY = int(objectCenterY)
# draw the center of the object on the image
cv2.circle(clone, (objectCenterX, objectCenterY), 10, (255, 255, 255), 2)
# show the output image
cv2.imshow("All Contours + center", clone)
cv2.waitKey(0)
# save the image
cv2.imwrite("docsIMG/All_Contours_and_center_disparity.png", clone)
True
The image displayed
Get the centerCodinates for drawing purposes later
########################################
moments = [cv2.moments(cnt) for cnt in contours0]
centroids = [( int(round(m['m10']/m['m00'])), int(round(m['m01']/m['m00'])) ) for m in moments]
centerCordinates = []
for ctr in centroids:
centerCordinates.append(ctr)
centerCordinates = np.asarray(centerCordinates)
#########################################
Make a bounding box with some margin around the obstacle
(contours0, _) = cv2.findContours(clone.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
xLast, yLast = clone.shape[:2]
wLast = 0
hLast = 0
for c in contours0:
# fit a bounding box to the contour
(x, y, w, h) = cv2.boundingRect(c)
if(xLast > x):
xLast = x
if(yLast > y):
yLast = y
#if (wLast < w):
wLast = wLast + w
#if (hLast < h):
hLast = hLast + h
print "x : " + str(x)
print "y : " + str(y)
print "w : " + str(w)
cv2.rectangle(clone, (xLast, yLast), (xLast + wLast, yLast + hLast), (255, 255, 255), 2)
# Display the drawn image
cv2.imshow("drawnImage", clone)
cv2.waitKey(0)
# save the image
cv2.imwrite("docsIMG/drawnImage_boundingBox_disparity.png", clone)
x : 779
y : 883
w : 82
x : 715
y : 843
w : 26
x : 827
y : 835
w : 34
x : 843
y : 763
w : 18
x : 843
y : 739
w : 26
x : 843
y : 667
w : 18
x : 803
y : 1
w : 50
x : 347
y : 1
w : 514
x : 515
y : 1
w : 26
True
The image displayed